고정 헤더 영역
상세 컨텐츠
본문
반응형
1. Abstract
- 최근 ConvNet 관련된 연구를 보니 그 깊이가 깊을수록 정확도가 좋아지지만, 입력-출력 사이의 connection이 적으면 학습에 효율적이었다고 합니다.
- 그래서 DenseNet에서는 그 깊이를 줄이고, 모든 layer를 feed-forward하게 연결해주었다고 합니다.
- L 개의 layer에 대해 ConvNet에서 L 개의 connection이 있다고 하면, DenseNet에서는 $ \frac{L(L + 1)}{2} $ 개의 connection이 생깁니다.
- 이를 통해
- gradient-vanishing을 해결하고
- feature propagation을 강화했으며
- feature의 재사용을 encourage(?)하고
- parameter의 수를 감소 시켰다고 합니다.
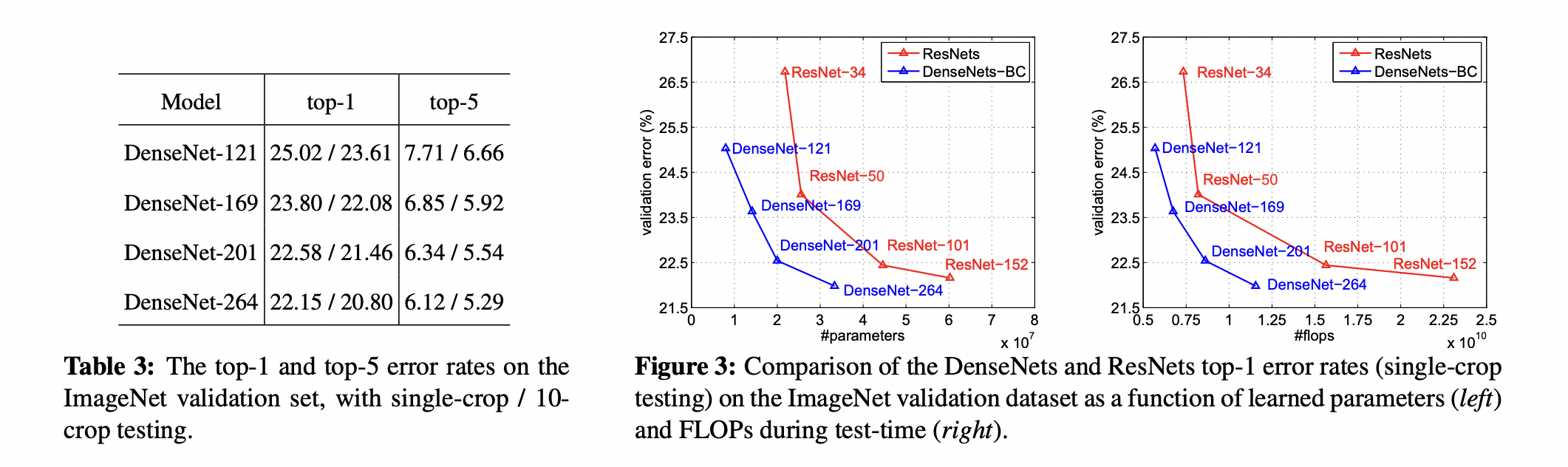
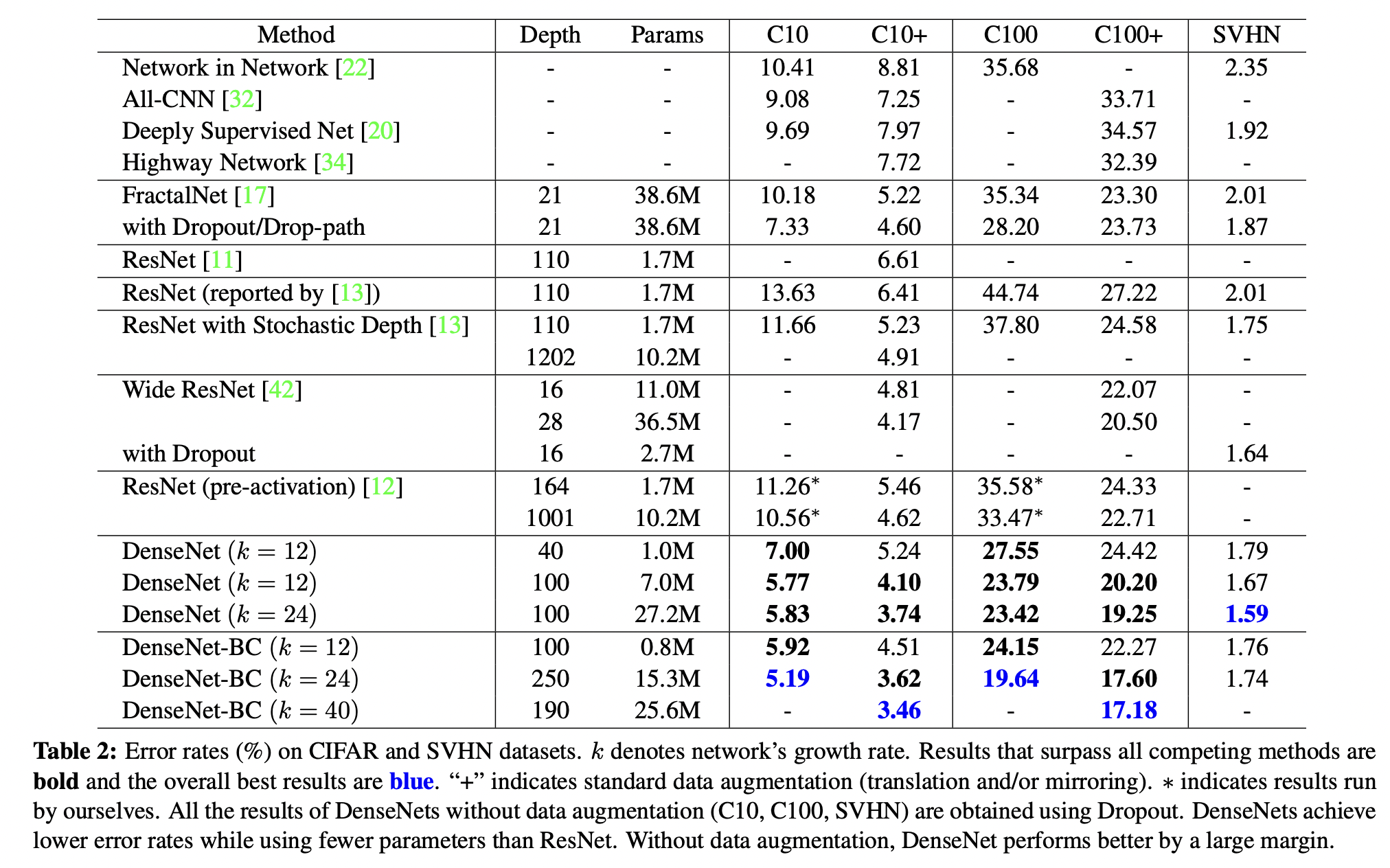
- CIFAR 10, CIFAR 100, SVHN, ImageNet 등에서 SOTA 를 기록했다고 합니다.
2. Introduction
- 현재 연구는 앞의 layer에서 뒤의 layer로 가는 짧은 경로를 만들어내는 쪽에 초점을 맞추고 있다고 합니다. DenseNet에서는 이를 녹여내어 모든 Layer를 연결해보았다고 합니다. 기존의 ResNet은 x와 H(x)를 더해주었다면, DensNet에서는 concat해줌으로서 depth를 늘려갑니다.
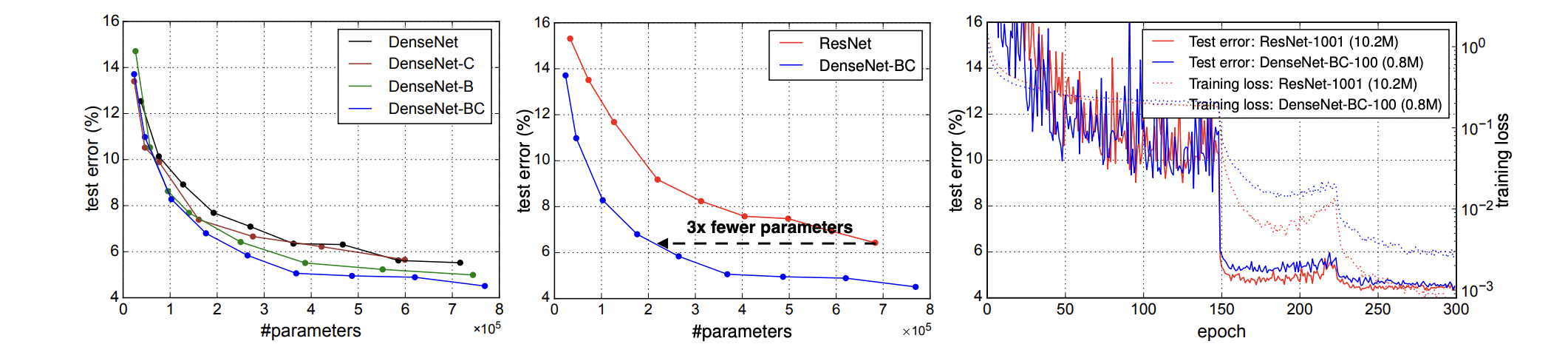
- abstract에서 언급된 DenseNet의 효과 중 4번에 의문을 가진 분들이 좀 있으실 겁니다. "아니, layer를 전부 이어줬는데 그게 어떻게 parameter 감소로 이어지지?" 하고요. 이는 DensNet이 불필요한 feature를 다시 학습할 필요가 없기 때문이라고 합니다.
- 최근 연구에 따르면 ResNet에서 상당히 일부 레이어만 학습에 관여한다고 하고, 심지어 몇 레이어를 제외하고 학습시켜도 비슷한 성능을 냈다고 합니다.
- DenseNet은 매우 좁은 feature map을 가지는데, 이는 feature map들을 바꾸지 않고 보존하는 "collective knowledge" 를 도입하고, 마지막 분류기에서 feature map들로부터 결정을 내림으로서 가능했습니다.
- 가장 큰 장점은 gradient의 흐름을 개선했고, 모든 레이어가 loss function 과 입력에 직접 맞닿아 있어 학습 시키기에 매우 용이했단 점이라고 합니다.
3. DenseNets

notation
- $x_{0}$ 는 convNet에 처음 들어가는 한 개의 image 입니다.
- 네트워크는 L 개의 layer로 구성되어 있고, 각 l 번째 layer는 비선형 변환 $H_{l}(\cdot)$ 과 BN, activation function 등으로 이루어져 있습니다.
- $l^{th}$ layer의 출력 feature map 을 $x_{l}$이라고 하겠습니다.
ResNets
- residual : $x_{l} = H_{l}(x_{l-1}) +x_{l-1}$
- residual block을 통해 전 layer의 출력을 다음 layer의 입력으로 넣어주어 gradient가 직접 전해질 수 있게 하는 것이 ResNet의 장점입니다.
- 하지만 identity function과 $H_{l}$이 합쳐짐으로서 정보의 흐름을 막을 수 있다고 합니다.
Dense connectivity
- $l^{th}$ layer가 $x_{0}, x_{1}, ..., x_{l-1}$을 입력으로 받고 이는 $x_{l} = H_{l}([x_{0}, x_{1}, ..., x_{l - 1}])$ 와 같이 표현될 수 있습니다.
- 이러한 Dense connectivity로 인해 본 논문에서 제안하는 모델의 이름이 DenseNet이라고 합니다.
Composite function
- $H_{l}$을 BN - ReLU - 3x3 convolution의 순서로 정의했습니다.
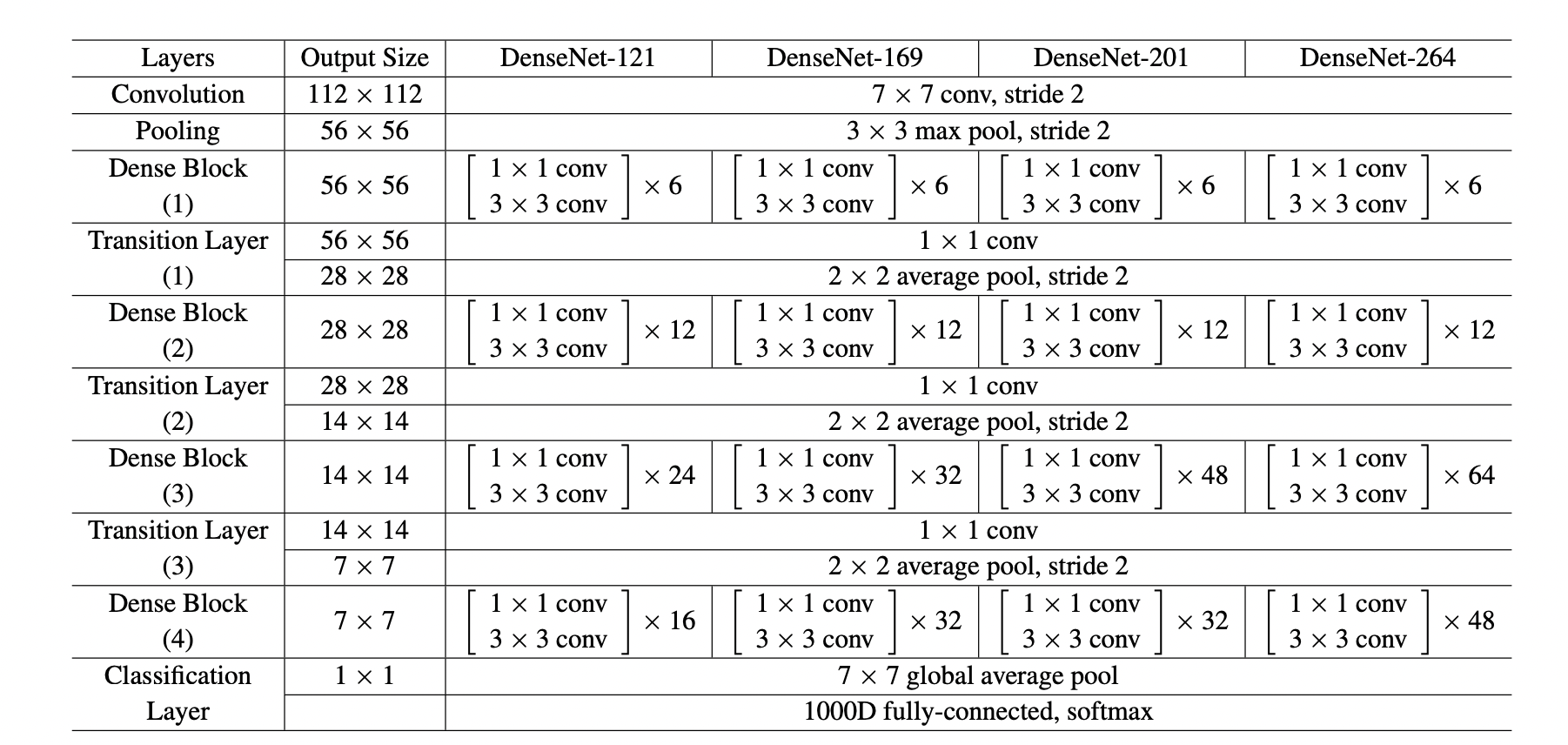
Pooling Layers
- 만약 $x_{l} = H_{l}([x_{0}, x_{1}, ..., x_{l - 1}])$ 에서 각 feature map 간의 크기가 다르다면 하나의 커널로 계산할 수 없을 것입니다.
- 그렇지만, CNN의 가장 큰 부분은 바로 featuremap의 크기를 변화시키는 down sampling 입니다.
- 하나의 커널로 연산하기 위해, 또 CNN의 성질을 잃게 하지 않기 위해 dense block이라는 것을 정의했다고 합니다.
- 하나의 dense block에서 나온 출력을 1x1 kernel로 conv해주고, (2, 2) kernel로 avg pooling을 해 다음 block에 넘겨줬다고 합니다.
- 이러면 각 dense block에서 feature의 크기도 유지하고 convnet의 성질도 보존할 수 있습니다.
Growth rate
- 각 비선형 변환 $H_{l}$에서는 k 개의 feature map을 형성하는데, 따라서 $l^{th}$ layer에서 $k_{0} + k(l-1)$ 개의 feature map을 입력으로 받게 됩니다.
- 기존 ConvNet과 DenseNet의 가장 큰 차이점은 굉장히 적은 feature map(k = 12)를 만든다는 것입니다.
- k를 groth rate 라는 hyperparameter로 정의하였습니다.
- 각 layer에서 출력으로 나온 feature map을 collective knowledge에 저장하고, 이는 네트워크의 전역 상태로도 볼 수 있게 됩니다. 이는 정말로 "전역적"이어서 모델에서 모델로 넘겨줄 과정이 필요 없이 어디서든 접근할 수 있다고 합니다.
Bottleneck Layers
- 1x1 conv
Compression
- .
Implementation Details
4. Results
5. Discussion
Model compactness
- 앞선 layer들에서 추출된 모든 feature map에 접근할 수 있어서 이들을 모두 재사용할 수 있고, 이는 model의 compactness를 향상시켰다고 합니다.
Implicit Deep Supervision
- 기존 ConvNet에 비해 loss function과의 짧은 connection으로부터 supervision을 받음으로서 성능이 향상되었다고 생각한다 합니다.
- 2~3 단계만 거치면 모든 layer가 loss function과 직접적으로 맞닿아 있기에 loss function과 gradient가 다소 덜 복잡한 구조를 지닌다고 합니다.
Stochastic vs Deterministic Connection
- stochastic depth regularization와 dense convolutional network 사이에 연관성이 있다고 합니다.
- 전자에서 residual network의 layer가 임의로 무시되고 이는 근처의 layer간의 직접적인 connection을 만들었습니다. pooling layer는 무시되지 않았기에(구조를 깰 수 있으므로?) 이는 DenseNet과 유사한 구조를 만들었다고 합니다.
Feature Reuse

1.모든 layer의 weight는 같은 블럭 내에서 많은 입력에 퍼지게 됩니다.
- 이는 매우 초기에 뽑힌 feature도 아주 깊이 있는 layer에서도 사용된다는 것을 알려줍니다.
2.Transition Layer의 weight도 여러 layer에 퍼지면서 첫 denseNet의 첫 레이어부터 마지막 레이어까지 정보를 전달하게 합니다.
3.2~3 block의 layer들은 transition layer의 output에 적은 weight을 할당합니다.
- 이는 transition layer가 많은 중복된 feature를 뽑아낸다는 것을 의미합니다.
4. classification layer에서도 전체 dense block의 가중치를 사용하지만 마지막 feature map에 상당히 집중된 것을 확인할 수 있습니다.
- 이는 network의 후반부에서 high-level feature를 생성하는 것이라고 생각된다고 합니다.
요약
- 하나의 dense block에서 모든 layer를 연결하는 구조를 가진 DenseNet을 제안하였습니다.
- 이는 불필요한 feature의 학습을 줄여 compactness를 향상시켰습니다.
- 기존의 convNet은 feature를 더해 그 의미를 희석시켰다면, 여기선 concat하여 의미를 보존하면서 pooling layer를 block사이에 두오 depth를 늘려가며 down sampling하는 기존 convNet의 구조를 유지하였습니다.
'ML, DL > Paper Review' 카테고리의 다른 글
| [Paper Review] A Simple Framework for Contrastive Learning of Visual Representation( SimCLR ) (0) | 2021.08.10 |
|---|





댓글 영역